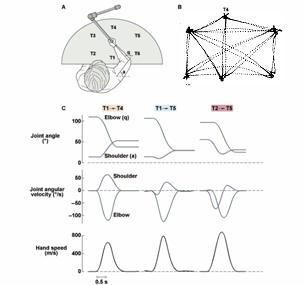
Reaching:
hand and joint kinematics are planned independently